
机载计算机类
机载计算机类主要修理项目
主要维修测试设备: 航空电子设备综合测试台、航空电子功能扩展测试台、多功能显示器测试台、空地导弹机多制式轰炸系统测试台、飞行显示系统测试台、头盔瞄准具测试台、多功能综合测试台、电路板综合测试台、飞行控制组件(FCU)测试台、大气数据计算机综合测试仪、飞参内场测试设备、集中告警系统测试台、数据采集器综合测试台、商业标准数字总线(CSDB)、数字信息传输系统(ARINC429/HB6096)、数字式时分制指令、响应型多路传输数据总线(MIL-STD-1553B/GJB289)等总线分析设备,能实现对机载计算机的各类数据进行模拟解析。
可开展:各类平视显示/武器瞄准系统(近10种)、态势处理机、各类多功能显示器(近20种)、头瞄系统、空地导弹机多制式轰炸系统、飞行显示系统、悬挂物管理控制显示系统、各类大气数据计算机(超过10种)、各类CNI子系统(近10种)、告警计算机、数据采集组件、飞参、语音记录仪等计算机类的排故修理、测试测试。
1.BDF-X电子飞行显示系统

BDF-X电子飞行显示系统由一个SXF-X信号处理机和两个XDC-X显示部件组成。电子飞行显示系统能保证电子飞行显示器的正常数据接入和与外围相关产品的通讯,提供信号量接入平台,保障飞行的实时状态显示。
通过429总线,同步信号仿真飞机飞行姿态、航向、大气数据、导航、着陆等信息,能在指定位置稳定地进行综合显示、垂直显示、水平显示、组合自卫电子对抗显示、自检测状态显示等画面,完成电子飞行显示系统的排故维修、测试等工作。
2.9518SX悬挂物管理控制显示系统

9518SX悬挂物管理控制显示系统由9518BX悬挂物管理控制显示部件和9518WX功率放大部件组成。根据飞机的外挂状态和来自飞机驾驶舱的指令,悬挂物管理控制显示部件向功率放大部件和飞机上的其他一些设备提供相应的控制信息,以达到对飞机上的外挂物进行有效的管理和控制,同时在自身前面板的显示窗上显示飞机外挂物的状态和对它们的一些控制信息。
我方通过开关量模拟提供悬挂物管理控制显示系统的输入信号,指示灯模拟显示悬挂物管理控制显示系统的输出信号,可进行排故维修、测试。
 3.JTK-2型头盔检测仪
3.JTK-2型头盔检测仪
检测仪与WTX-3/3S型头瞄系统连接,可以对头瞄单件工作状态以及各个工作电压进行检测;并可以通过429总线向头瞄传输方位角、俯仰角的修正数据以进行头瞄系统校准。
3.WTX-3S头盔瞄准具测试台

WTX-3S型头盔瞄准具是在保证飞行员救生安全及通讯的前提下,为飞行员提供单目、距焦于无穷远的固定瞄准环作为视线参考,通过使用两个扫描器组件测量头盔相对于飞机坐标系的角度,使飞行员能够快速指引武器系统攻击所观测目标从而提高飞机近距格斗的能力。
我方通过WTX-3S型头盔瞄准具测试台、429总线测试设备、数字示波器对头瞄系统的429信号输出、系统的各类工作电压与输出波形进行测试。
4.XYJ-XX多功能显示器

多功能显示器用于显示雷达、姿态、航向、雷达告警等画面,飞行员能通过周边键选择查看不同信息。显示器与信息处理机、大气机、雷达、雷达告警器、雷达高度表等产品交联,接收总线数据及视频信号。
我方采用429、422数据总线模拟各飞机系统给多功能显示器提供数据,并显示在多功能显示器上,用得到的数据判断各模块功能是否正常,以此来进行排故维修、测试。
5.平视显示/武器瞄准系统

平视显示/武器瞄准系统(平显火控系统)在战斗使用上,对空中目标适用于航炮、空空导弹的瞄准攻击,对底面目标适用于航炮、航箭及炸弹的瞄准攻击。该系统还可以显示飞行、导航等有关信息供驾驶员操纵飞机时使用,这对减轻驾驶员负担,不丢失战机起到了极好的作用。
利用429总线仿真飞机的大气数据、GPS数据,组合导航数据等各类数据,以及与角度信号源配合仿真出飞机的横滚、俯仰、航向姿态,完成对整个平视显示/武器瞄准系统的排故维修、测试等工作。
6.瞄准具自动测试仪

瞄准具自动测试仪可对某型瞄准具进行系统测试,也可对瞄准具的各部件进行单独测试。
7.总线分析设备
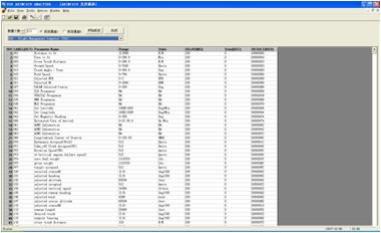
公司自行设计开发了多种总线分析软件硬件产品,可对CSDB、ARINC429、ARINC629、1553B等总线数据进行解析仿真,完成与各种机载计算机类成品交互、通讯,满足修理这类机载计算机的测试要求。
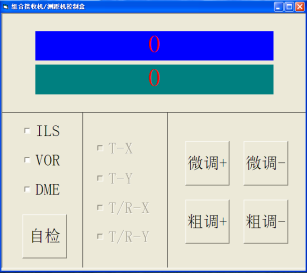
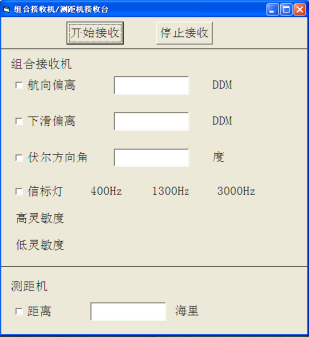
8.组合测距机总线分析软件
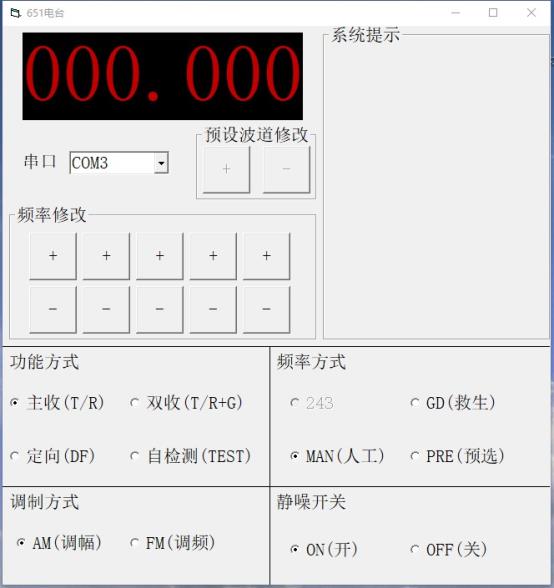
9.651电台控制盒模拟软件
651电台控制盒模拟软件可用于651电台相关性能参数的测试,可模拟651电台控制盒的主要功能。
10.XYJ-9/XYJ-148多功能显示器测试设备

该测试设备由显示器、主机箱、工控机及测试电缆组成,能够对XYJ-9/XYJ-148多功能显示器进行全面测试,能够满足对多功能显示器的排故、维修、测试。
11. 备用航姿系统

该设备系统由备用航姿计算机、磁传感器、备用航姿控制板、航向指示器等部件组成。该系统是通过备用航姿计算机内部的惯性测量单位IMU感受并输出沿机体3个轴向的角速度和线加速度信号。然后将IMU的输出信号与磁传感器输出的磁航向信号、大气数据计算器输出的大气数据信息组合,经误差修正、航姿解算、信息融合后,输出载体的磁航向、横滚、俯仰信息。

